


「本期划重点」
-
全球首个多传感器虚拟标注数据集:51WORLD
-
最大的自动驾驶多任务合成数据集:SHIFT
-
第一个用于车对车感知的大规模开放模拟数据集:OPV2V

「八大系列概览」
本文是<系列八:仿真数据集>,下面共包括6个数据集:
「SHIFT」
-
发布方:苏黎世联邦理工学院视觉智能和系统组
-
下载地址:
www.vis.xyz/shift
-
论文地址:
https://arxiv.org/abs/2206.08367
-
发布时间:2022年
-
简介:最大的自动驾驶多任务合成数据集,它呈现了云量、雨和雾的强度、一天中的时间以及车辆和行人密度的离散和连续变化。SHIFT具有全面的传感器套件和几个主流感知任务的注释,可以调查感知系统性能在领域转移水平增加时的退化情况,促进持续适应策略的发展,以缓解这一问题并评估模型的鲁棒性和通用性
-
特征
-
最大的合成数据集
-
一个多任务驱动数据集
-
具有各种条件下最重要的感知任务,并具有全面的传感器设置
-
提供了最全面的注释和条件集
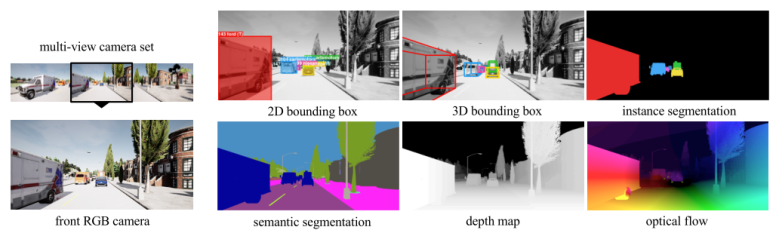
数据集中的RGB相机的注释集
「Livox」
-
发布方:Livox
-
下载地址:
https://livox-wiki-cn.readthedocs.io/zh_CN/latest/data_summary/dataset.html
-
官网地址:
https://www.livoxtech.com/cn/simu-dataset
-
发布时间:2021年
-
简介:Livox仿真数据集是基于自动驾驶仿真测试平台生成的点云数据和对应标注,支持3D目标检测和语义分割任务。其中传感器配置了5个激光雷达和1个超远距激光雷达,整个数据集包含了14445帧360°Lidar点云数据,6种目标的3D包围框标注和14种类别的点云语义标注。数据集场景主要为市区宽阔道路场景,包括双向12车道和双向8车道。相应地,该仿真场景中也包含了多种车辆和行人模型,以及更贴近真实场景的交通流模拟。此外,丰富的红绿灯、交通标识牌、隔离物(包括隔离栏杆、绿化带、隔离墩等)、树木建筑等都让整个仿真场景更加贴近实际驾驶路况
-
特征
-
包含丰富的场景建模,更贴近真实场景的交通流模拟
-
14445帧360°点云数据
-
6种目标的3D包围框和目标追踪ID标注
-
14种类别的点云语义标注
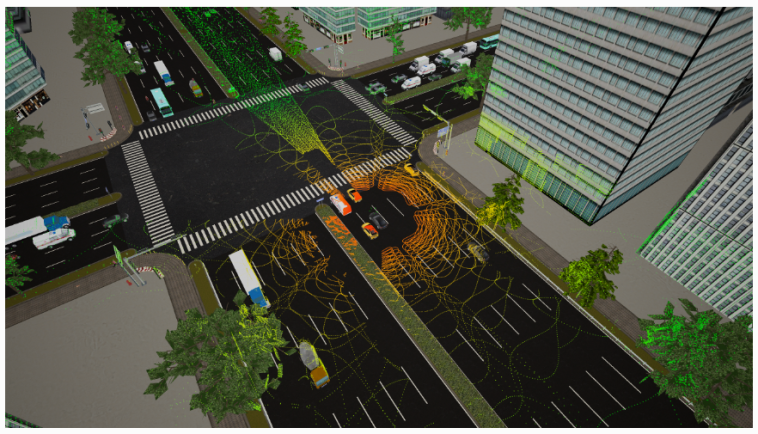
仿真场景示例
03
「51WORLD」
-
发布方:51WORLD
-
下载地址:
https://gitee.com/OpenSimOne
-
官网地址:
https://www.51aes.com/
-
发布时间:2020年
-
简介:51WORLD虚拟标注数据是基于其自研的自动驾驶仿真测试平台51Sim-One生成及标注。该平台集静态和动态数据导入、传感器仿真、动力学仿真、可视化、测试与回放、虚拟数据集生成,在环测试等为一体。功能模块覆盖自动驾驶仿真测试的全流程,兼具规模,高精度和高真实感,并可自动完成多传感器原始数据(图像和点云)和真值得同步输出
-
特征
-
涵盖了常见的摄像头仿真数据集,还有激光雷达仿真数据集
-
包含了对于自动驾驶系统有挑战性的极限工况、复杂道路、天气条件等
原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2022/09/8376.html