



「本期划重点」
-
不同城市不同时段收集的复杂路况真实数据的数据集:Complex Urban, ApolloScape, Elektra (CVC-13), KITTI Stereo 2015, Oxford RobotCar, Málaga Stereo and Urban
-
Complex Urban为机器人操作系统环境中提供了开发工具
-
ApolloScape促进感知、导航和控制等方面的创新
-
Oxford RobotCar收集了同一条路线所有天气情况和几乎所有道路场景

「八大系列概览」
-
系列五:全景数据集
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
「 Complex Urban 」
-
发布方:韩国科学技术院
-
下载地址:
http://irap.kaist.ac.kr/dataset
-
论文地址:
https://ieeexplore.ieee.org/document/8460834
-
发布时间:2018年
-
简介:该数据集提供光探测和测距(激光雷达)数据和立体图像与各种位置传感器目标高度复杂的城市环境。所提供的数据集捕捉了城市环境(例如大都市地区、复杂建筑和居住区)的特征。给出了二维和三维激光雷达的数据,这是典型的激光雷达传感器。用于车辆导航的原始传感器数据以文件格式提供。为了方便开发,在机器人操作系统(ROS)环境中提供了开发工具
-
特征
-
提供来自不同环境的数据,如复杂的大都市地区、住宅区和公寓楼群
-
提供具有两个级别精度的传感器数据(普通低精度传感器和昂贵的高精度传感器)
-
通过使用高精度导航传感器的SLAM算法和人工迭代最接近点(ICP)提供基线
-
通过ROS为普通机器人社区提供开发工具
-
针对不同的机器人应用使用WebGL提供原始数据和3D预览

「ApolloScape」
-
发布方:百度
-
下载地址:
http://apolloscape.auto/stereo.html#to_data_href
-
官网地址:
http://apolloscape.auto/index.html
-
发布时间:2018年
-
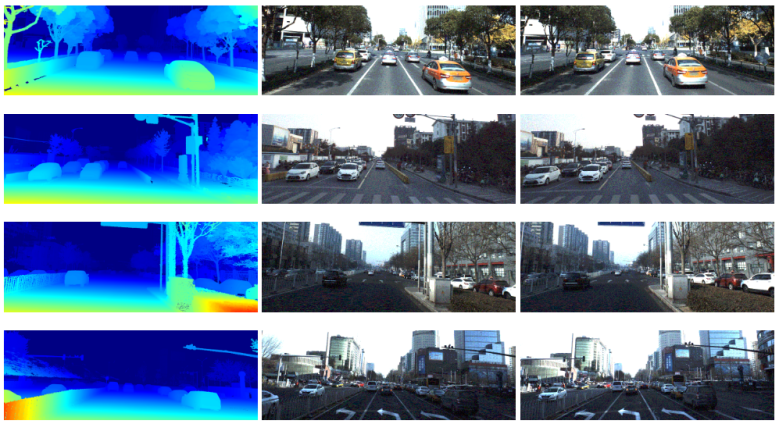
简介:ApolloScape是Apollo自动驾驶项目的一部分,是一个以研究为导向的项目,旨在促进自动驾驶各个方面的创新,包括感知、导航和控制。它提供了对语义注释(像素级)街景图像和模拟工具的公开访问,支持用户定义的政策。这是一个不断发展的项目,新的数据集和新的能力将被定期添加
-
特征
-
由5165个图像对和相应的差异图,其中4156个图像对用于训练,1009个图像对用于测试
-
通过积累来自激光雷达的三维点云和将三维CAD模型拟合到单独移动的汽车上获得真实值
-
包含不同的交通状况和严重的遮挡
「Elektra(CVC-13)」
发布方:巴塞罗那自治大学
-
下载地址:
http://adas.cvc.uab.es/elektra/enigma-portfolio/cvc-13-multimodal-stereo-dataset/
-
官网地址:
http://adas.cvc.uab.es/elektra/
-
发布时间:2016年
-
简介:该数据集由三个多模态立体图像子集组成,每个子集都包含不同的场景系列:道路、外墙和平滑表面。每个子集包含在不同条件和日期拍摄的图像。对于每对多模态立体图像,都会给出一个真实的或合成的深度图,用作ground truth。此外该数据集还提供了相应的校准集
-
特征
-
所有图像使用彩色相机和红外相机拍摄记录
-
所有图像均以PPM和BMP格式提供

「KITTI Stereo 2015」
发布方:德国卡尔斯鲁厄理工学院
-
下载地址:
http://www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo
-
原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2022/08/8381.html