



「本期划重点」
-
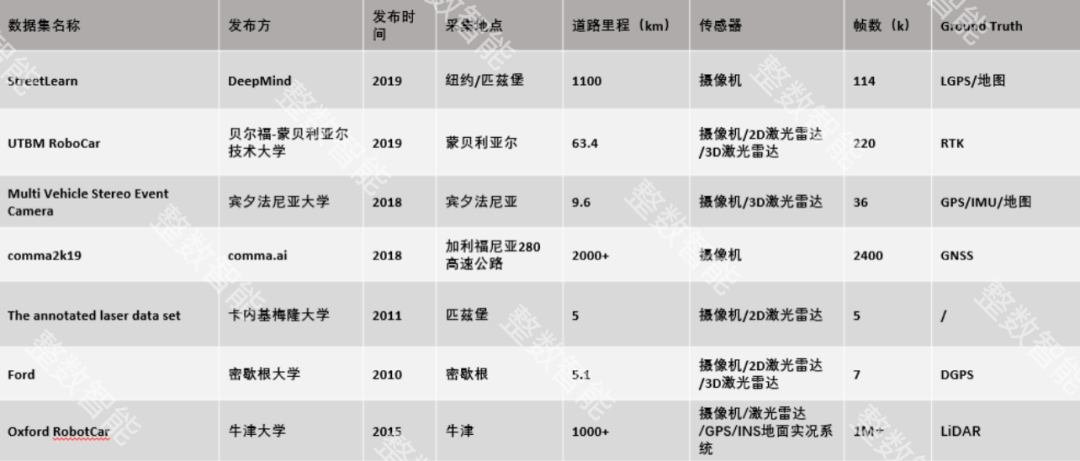
支持端到端的深度强化学习的研究:StreetLearn
-
包含城市和郊区驾驶的新特性,如高度动态环境、回旋、斜坡道路、建筑绕行、激进驾驶等:UTBM RoboCar
-
第一个使用同步立体事件相机收集数据的数据集:Multi Vehicle Stereo Event Camera
-
小区域内高度密集的数据:comma2k19
「八大系列概览」
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
下面共包括7个数据集:
「StreetLearn」
-
发布方:DeepMind
-
下载地址:
http://streetlearn.cc
-
论文地址:
https://xueshu.baidu.com/usercenter/paper/show?paperid=1r4304w0c47q0xx0sb3m06c0fc659763
-
发布时间:2019年
-
简介:为了支持通过探索和与环境的互动来直接学习导航策略的研究(例如使用端到端的深度强化学习),DeepMind设计了StreetLearn,它是一个交互式的、第一人称的、部分观察的视觉环境,使用谷歌街景的照片内容和广泛的覆盖范围,包括匹兹堡和纽约市这两大区域,并给出了一个具有挑战性的目标驱动的导航任务的性能基线
-
特征
-
照片分辨率高
-
展示了多种城市场景
-
以真实的街道连接图横跨城市规模的区域
-
作者开发了几个遍历任务,要求代理在较长的距离内从一个目标导航到另一个目标
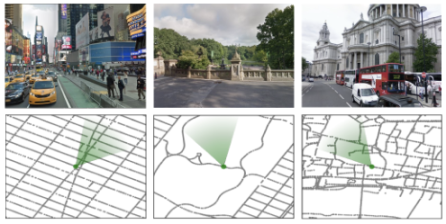
纽约(时代广场、中央公园)和伦敦(圣保罗大教堂)的不同景观和相应的当地地图
「UTBM RoboCar」
-
发布方:贝尔福-蒙贝利亚尔技术大学
-
下载地址:
https://epan-utbm.github.io/utbm_robocar_dataset/
-
论文地址
https://arxiv.org/abs/1909.03330
-
发布时间:2019年
-
简介:该数据集通过一个多传感器平台收集数据,该平台集成了11个异质传感器,包括各种相机和激光雷达、雷达、IMU(惯性测量单元)和GPS-RTK(全球定位系统/实时运动学),同时利用基于ROS(机器人操作系统)的软件来处理感官数据。该数据集用于自主驾驶,以应对许多新的研究挑战(如高动态环境),特别是长期的自主性(如创建和维护地图)
-
特征
-
完全基于ROS
-
记录了城市和郊区的地图数据,并包含了许多城市和郊区驾驶的新特性,如高度动态环境(车辆里程测量中的大量移动对象)、回旋、斜坡道路、建筑绕行、激进驾驶等
-
提供了GPS-RTK记录的地面真实轨迹,用于车辆定位
-
捕捉了日常和季节变化,特别适合长期的车辆自主研究
-
实现了loam velodyne和LeGO-LOAM作为基线的激光雷达里程测量基准
-
提供了各种迂回数据旨在开展车辆行为预测的相关研究,帮助减少此类情况下的装车事故
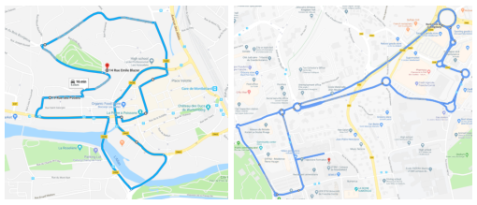
在谷歌地图上绘制的数据收集行程,左:用于长期数据。右:用于迂回数据
03
「Multi Vehicle Stereo Event Camera」
-
发布方:宾夕法尼亚大学
-
下载地址:
https://daniilidis-group.github.io/mvsec
-
论文地址:
https://xueshu.baidu.com/usercenter/paper/show?paperid=db1a3beb87eca6e87b799b1c1d87111d
-
发布时间:2018年
-
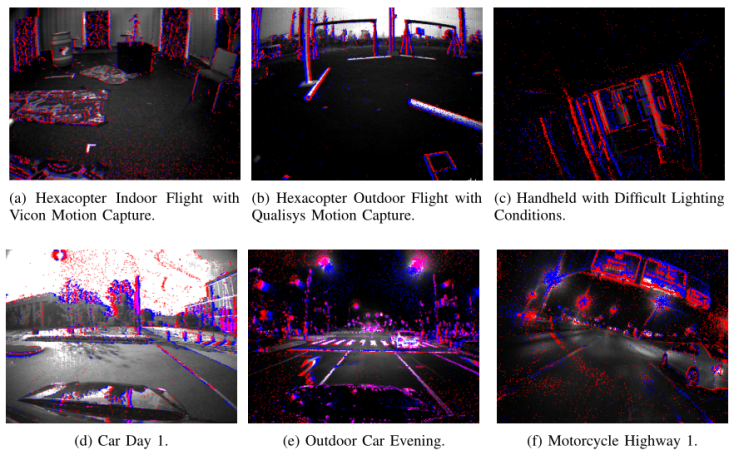
简介:该数据集由一个同步的基于事件的立体对相机系统在各种不同的照明水平和环境下收集数据,该系统由一个手持式设备携带,由一架六旋翼飞机飞行,在汽车顶部驱动,并安装在摩托车上。每台摄像机中,提供了事件流、灰度图像和IMU读数。此外,作者利用IMU、一个刚性安装的激光雷达系统、室内和室外运动捕捉和GPS的组合,以高达100Hz的频率为每个摄像机提供准确的姿势和深度图像
-
特征
-
基于事件的相机通过检测图像的对数强度变化来感知世界,精确地记录数十微秒级的变化和异步的、几乎是及时的反馈,允许极低的延迟响应
-
提供了来自两个同步和校准的动态视觉和主动像素传感器的事件流,具有各种照明和速度下的长室内和室外序列
-
精确的深度图像和高达100Hz的频率
发布方:comma.ai
原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2022/08/8379.html