


「本期划重点」
-
首次提出由驾驶视频、激光雷达和相应的驾驶行为组成的数据集:DBNet
-
第一个带注释的DAVIS行车记录开放数据集:DDD17
-
第一组自然驾驶数据集:Brain4Cars

「八大系列概览」
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
本文是<系列七:驾驶行为数据集>,下面共包括10个数据集:
「DBNet」
-
发布方:上海交通大学
-
下载地址:
http://www.dbehavior.net
-
论文地址:
http://www.dbehavior.net/data/egpaper_release.pdf
-
发布时间:2018年
-
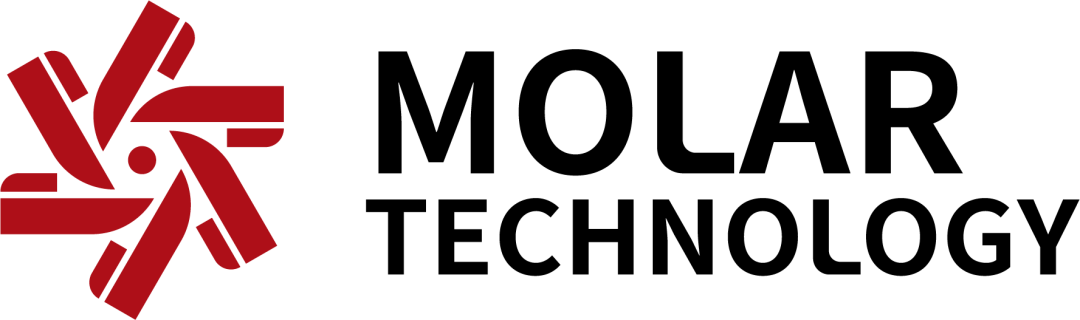
简介:该网络提供了由Velodyne激光扫描的大规模高质量点云、仪表盘摄像头记录的视频和标准司机行为
-
特征
-
大规模:该数据集由超过10k帧的真实街景组成,数据总量超过1TB
-
多样性:记录真实交通中连续而多变的场景,如海边道路、学校区域甚至是山路,其中包含了大量的十字路口、行人和交通标志
-
高质量:数据集中的点云、视频和驾驶员行为均通过高分辨率传感器获取,能够较好地还原真实驾驶工况
第一行是灰色特征图,第二行是对应的使用喷射彩色地图的彩色特征图
「DDD17」
-
发布方:苏黎世联邦理工学院
-
下载地址:
sensors.ini.uzh.ch/databases
-
论文地址:
https://xueshu.baidu.com/usercenter/paper/show?paperid=af61bd34613491c87c1e28579e900d42
-
发布时间:2017年
-
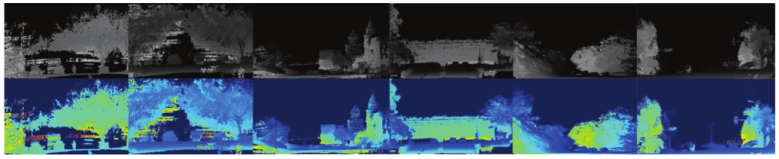
简介:DDD17是第一个带注释的DAVIS行车记录开放数据集。DDD17有一个346×260像素的DAVIS传感器,可以记录公路和城市在白天、晚上、夜晚、干湿天气条件下的行驶情况,以及从车载诊断界面获取的车辆速度、GPS位置、驾驶员转向、油门和刹车信息
-
特征
-
使用活动像素视觉传感器(DAVIS)收集数据
-
DAVIS行车记录带有注释
顶部面板显示DAVIS框架(左:覆盖了一些驾驶数据集,右:事件),底部面板显示了进度条,以及不同车辆数据的可视化(顶部是前灯状态,中间是转向角度,底部是速度)
03
「Brain4Cars」
-
发布方:康奈尔大学
-
下载地址:
http://www.brain4cars.com
-
论文地址:
https://xueshu.baidu.com/usercenter/paper/show?paperid=db1a3beb87eca6e87b799b1c1d87111d
-
发布时间:2016年
-
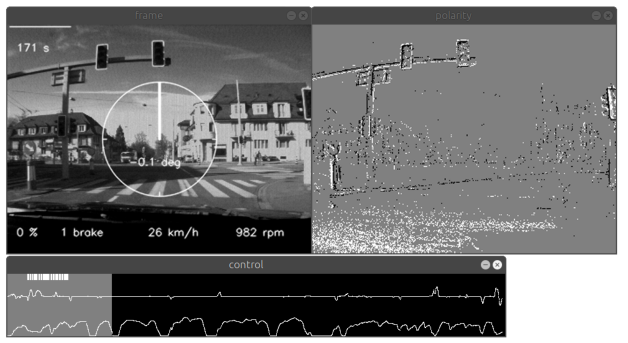
简介:该数据集包括1180英里的自然高速公路和城市驾驶,并表明可以在机动车实时发生前3.5秒预测这些机动车,精确度和召回率分别为90.5%和87.4%
-
特征
-
提出了一种提前几秒钟预测驾驶动作的方法
-
第一组自然驾驶的数据集,包括车内的视频、GPS和速度信息
数据集在司机和景观方面是多样化的
-
发布方:摩德纳大学
-
下载地址:
http://imagelab.ing.unimore.it/dreyeve
-