



「本期划重点」
-
波恩大学推出迄今为止最大的拥有序列信息的数据集SemanticKITTI
-
韩国科学技术院发布Highway Driving,该数据集提供的标注在空间上和时间上都比其他现有的数据集更密集
-
剑桥大学推出CamVid,提供第一个具有对象类语义标签的视频集合

「八大系列概览」
系列一:目标检测数据集
-
系列二:语义分割数据集
-
系列三:车道线检测数据集
-
系列四:光流数据集
-
系列五:Stereo Dataset
-
系列六:定位与地图数据集
-
系列七:驾驶行为数据集
-
系列八:仿真数据集
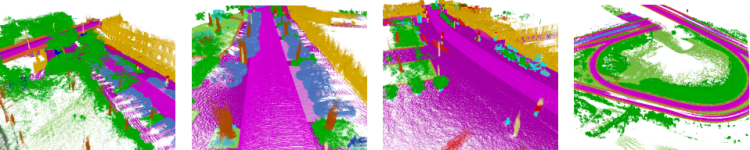
「SemanticKITTI」
-
发布方:波恩大学 (University of Bonn) -
下载地址: http://www.semantic-kitti.org/dataset.html#overview -
论文地址: https://www.researchgate.net/profile/MartinGarbade/publication/332168840_A_Dataset_for_Semantic_Segmentation_of_Point_Cloud_Sequences/links/5cac76d0299bf184605517a1/A-Dataset-for-Semantic-Segmentation-of-Point-Cloud-Sequences.pdf -
发布时间:2019年 -
简介:SemanticKITTI是KITTI在语义分割方向的子数据集,是激光雷达语义分割的重要基准之一,是迄今为止最大的拥有序列信息的数据集。它对 KITTI Vision Odometry Benchmark 中的所有序列都进行了标注,并为所用汽车激光雷达的完整360°视野提供了密集的逐点标注。基于该数据集,研发团队提出了三个基准任务:(i)使用单次扫描对点云进行语义分割,(ii)使用序列计算多个过去扫描的语义分段,(iii)语义场景完成 -
特征
-
提供23 201 次全 3D 扫描用于训练,20 351 次用于测试
-
该数据集包含 28 个标注类别,分为静态对象和动态对象,既包括行人、车辆等交通参与者,也包括停车场、人行道等地面设施
-
数据集包括518块瓷砖,共计超过1700个小时的标注工作
-
研发团队还将数据采集过程中用到的点云标记工具进行了开源
「Highway Driving」
-
发布方:韩国科学技术院(Korea Advanced Institute of Science and Technology)
-
下载地址:
https://sites.google.com/site/highwaydrivingdataset/
-
论文地址
https://arxiv.org/pdf/2011.00674.pdf
-
发布时间:2019年
-
简介:高速公路驾驶数据集是一个密集标注的语义视频分割任务的基准,它所提供的标注在空间上和时间上都比其他现有的数据集更密集。每一帧的标注都考虑到了相邻帧之间的关联性
-
特征
原创文章,作者:整数智能,如若转载,请注明出处:https://www.agent-universe.cn/2022/05/8386.html